


Virtual Mass in Seaplane Impact Theory: From Potential Flow to Certification Loads
When a seaplane hull penetrates the water surface, the resulting deceleration depends not on the aircraft mass alone but on a substantially larger “virtual mass” that includes accelerated water. For typical landing conditions, this virtual mass can exceed the aircraft mass by factors of two to three. Neglecting or miscalculating this effect leads to structural designs that are either dangerously unconservative or unnecessarily heavy.
The virtual mass concept did not originate with seaplanes. Friedrich Bessel formalized it in 1828 while studying pendulum oscillations in fluid, and mathematicians including Stokes and Poisson established the theoretical foundations by the 1840s. Theodore von Kármán adapted this classical theory to seaplane impact in 1929, recognizing that the air-water interface creates a half-space problem where only water contributes meaningfully to the inertial loading.
The Physical Mechanism
Consider a body accelerating through fluid. The body cannot simply push fluid aside instantaneously. Instead, it must impart momentum to the surrounding fluid, which requires force and therefore appears as increased inertia from the perspective of whatever drives the body’s motion.
A simple experiment illustrates the effect. Move a spoon slowly back and forth in a cup of water. With the bowl facing the direction of motion, you feel substantial resistance to each direction change. Rotate the spoon 90 degrees so the edge leads, and the resistance nearly vanishes. The spoon’s actual mass is unchanged, but its virtual mass depends strongly on orientation. The bowl presents a large frontal area that must accelerate water ahead of it; the edge slips through with minimal fluid displacement.
The body does not only push fluid ahead. Fluid must also flow in behind to fill the void the body leaves. Both contributions add to the virtual mass. For a body submerged in a single fluid, pushed and trailing fluid come from the same medium and contribute equally.
To quantify virtual mass, consider energy. When a body moves through fluid, the fluid acquires kinetic energy. If we calculate this energy as a function of body velocity, we can extract the added mass.
Derivation of Added Mass for a Flat Plate
We derive the added mass per unit length for a flat plate of half-width b moving perpendicular to its plane through unbounded fluid. This result will later be adapted to seaplane hull sections.
Step 1: Potential flow formulation. For an ideal fluid that is inviscid, incompressible, and irrotational, the velocity field derives from a scalar potential φ. Mass conservation requires this potential to satisfy Laplace’s equation
throughout the fluid domain. This linear equation admits analytical solutions for simple geometries.
Step 2: Boundary conditions. Two conditions constrain the solution. At the body surface, the fluid velocity normal to the surface must equal the body’s normal velocity. Far from the body, the flow disturbance must decay to zero.
Step 3: Solution. The potential flow solution for a flat plate follows from conformal mapping. The plate maps to a circle, and the added mass of a flat plate equals that of a circular cylinder with diameter equal to the plate width. The fluid kinetic energy per unit length evaluates to
Comparing with the general form T = (1/2) m_added v² identifies the added mass per unit length
The factor π comes from the circular geometry in the conformal mapping. The added mass equals the mass of fluid in a circular cylinder of radius b.
Application to Seaplane Hull Sections
A seaplane hull does not move through unbounded fluid. It penetrates the air-water interface where boundary conditions differ.
Virtual mass has two contributions: fluid pushed ahead and fluid filling the void behind. At the water surface, water accelerates ahead of the descending hull, but air fills the void above. Since air has density roughly 800 times smaller than water, its contribution to momentum exchange is negligible, less than 0.12% of the water contribution. The hull experiences only half the added mass it would have if fully submerged.
Von Kármán recognized this in 1929 and formulated the problem as a half-space where only water participates. For a wedge section with half-width x at the waterline, the added mass per unit length becomes
The factor 1/2 compared to the fully submerged case reflects the negligible air contribution. This expression governs seaplane impact load calculations.
Time-Varying Added Mass During Impact
The results above describe a body at fixed penetration depth. During water entry, the wetted width grows continuously as the hull descends, and the added mass increases correspondingly. This time variation introduces a force component beyond simple F = ma that often dominates the impact loading.
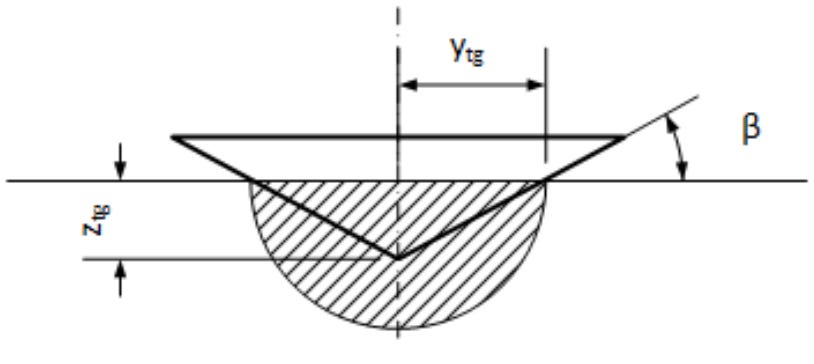
For a wedge with deadrise angle β, geometry relates the wetted half-width x to the penetration depth z
Von Kármán’s original 1929 formulation assumed the water surface remains flat during impact. With the hull descending at constant vertical velocity v, the penetration depth is simply z = vt, giving
Wagner’s 1932 analysis revealed that this assumption substantially underestimates the wetted width. The water surface does not remain flat but rises ahead of the impacting body, creating a pile-up that increases the effective wetted region. Wagner solved the coupled problem of body motion and free surface deformation using conformal mapping techniques.
His result for the wetted half-width is
The factor π/2 ≈ 1.57 represents the pile-up correction. The water surface rises by an amount comparable to the geometric penetration, nearly doubling the wetted width compared to flat-surface assumptions.
Wagner also showed that expressing results in terms of the actual wetted width d along the deformed surface leads to simpler formulas. The wetted half-width evolves as
The square-root time dependence emerges from matching the contact line velocity to the outward flow velocity at the spray root. The rate of wetted width growth is
This derivative decreases with time, meaning the wetted region expands rapidly at first and more slowly as the impact progresses.
Force Calculation from Momentum Conservation
The total momentum of the system comprising hull and accelerated water must satisfy Newton’s second law. If the hull has mass M and the added mass is m_added(t), the instantaneous momentum is
where v(t) is the vertical velocity. The vertical force on the hull equals the rate of momentum change
The first term represents force from the growing added mass. The second term is the conventional F = ma with virtual mass replacing hull mass alone.
Early in the impact, the added mass is small but growing rapidly; the dm/dt term dominates. Later, added mass is large but growing slowly; the deceleration term becomes more significant.
Constant Velocity Approximation
For the initial phase before momentum transfer reduces hull velocity appreciably, we can set dv/dt = 0. The force simplifies to
Taking the time derivative of the added mass expression
where L is the wetted length along the hull, gives
The force per unit wetted length becomes
Substituting Wagner’s expressions for d and d-dot yields force as an explicit function of time
The inverse dependence on time shows that force per unit length is highest immediately after contact and decreases as the impact progresses. The singularity at t = 0 is mathematical; physically, finite hull curvature and fluid compressibility limit peak pressures to finite values.
In practice, peak total force occurs within the first 10 to 50 milliseconds. Although force per unit length decreases with time, the wetted length grows, and the product reaches a maximum before decaying. For complete analysis including velocity reduction and rebound, the full momentum equation must be integrated numerically.
Deadrise Angle Effects
The deadrise angle β appears in the denominator of the wetted width expressions, meaning smaller deadrise angles produce larger wetted widths and therefore larger added masses and forces for given penetration depth.
For the added mass coefficient as a function of deadrise angle, Wagner’s theory gives
where the added mass per unit length is
For typical seaplane deadrise angles between 15 and 30 degrees, this coefficient ranges from approximately 20 down to 5. The strong sensitivity to deadrise angle explains why hull geometry optimization focuses heavily on this parameter.
Lower deadrise angles produce higher loads but also provide better planing efficiency and lower takeoff speeds. Hull design requires balancing these competing demands.
Pressure Distribution Along the Hull
While total force determines overall structural loads, the pressure distribution matters for local structural design. Wagner’s theory provides the pressure at any point x along the wetted surface
This expression shows a square-root singularity as x approaches d, meaning pressure increases dramatically near the spray root at the edges of the wetted region. The singularity is mathematical artifact of idealized boundary conditions, but it correctly indicates that peak pressures occur not at the keel but near the moving contact line.
At the keel centerline where x = 0, the pressure simplifies to
Peak pressures near the spray root reach 2 to 3 times the keel value, which must be considered for local plate sizing and stiffener spacing.
Validation Against CFD
Classical virtual mass calculations provide independent validation for computational fluid dynamics simulations. When CFD results differ substantially from Wagner-based estimates, one or the other contains errors.
Typical sources of CFD error include inadequate mesh resolution near the free surface, insufficient temporal resolution during rapid transients, and incorrect modeling of multiphase flow physics. The analytical calculation serves as a sanity check that catches these problems before they propagate into structural designs.
Agreement within 20% between Wagner theory and properly executed CFD indicates both methods capture the relevant physics. Larger discrepancies warrant investigation.
Limitations of the Theory
Virtual mass theory assumes potential flow, which means inviscid and irrotational motion. Real water has viscosity, and real impacts generate vorticity at separation points. The idealized theory captures dominant effects while missing secondary phenomena.
The main limitation concerns the singularity at t = 0. The theory predicts infinite forces at the instant of contact, which cannot occur physically. Fluid compressibility, finite hull curvature at the keel, and air cushioning smooth the singularity to finite values. The acoustic pressure from compressibility can be estimated as
where c is the speed of sound in water, approximately 1500 m/s. For a 2 m/s impact, this gives 3 MPa, which far exceeds the hydrodynamic pressures that develop after the initial acoustic phase. This early compressibility-dominated regime lasts only microseconds and generally does not govern structural design except for very high-speed impacts.
The half-space approximation assumes a clear air-water interface. Aerated flow near high-speed hulls, spray sheet formation, and cavity collapse can violate this assumption. These effects matter at high Froude numbers typical of planing but are less important during the initial impact phase that determines peak structural loads.
Variable deadrise along the hull presents another complication. Real hulls often have different deadrise angles at different longitudinal stations, with lower values near the step and higher values toward the bow. The theory applies locally to each section, but integrating over varying geometry requires numerical treatment or conservative assumptions about which section governs design.
Chine immersion changes the flow pattern. Once water reaches the chine, it can no longer flow laterally outward and must instead flow along the hull length. The added mass formulation changes, and the expressions derived for pre-chine conditions no longer apply. NACA developed separate methods for chine-immersed conditions that appear in Reports 1074 and 1359.
Step geometry introduces discontinuities that prismatic theory cannot address. Flow separation at the step, ventilation of the afterbody, and potential re-wetting during porpoising require treatment beyond virtual mass concepts. Flight testing and model basin experiments remain necessary for validating predictions near these features.
If you find value in Engineering Airworthiness, consider subscribing for free.
If you think someone might benefit from it, feel free to share it.